

Robotiq三指自适应夹具是多功能性和灵活性的最佳选择。 它拾取任何形状的任何物体。它适应物体的形状以获得牢固的抓力,三指夹爪与所有工业机器人兼容。我们为Universal Robots机器人提供方便的现成集成包。 还提供并支持ROS包。 使用Robotiq的三指夹爪,您将专注于您的研究目标,而不是努力整合您的末端执行器。
Versatile Gripper
With force, position and speed control for each finger and 4 different grip modes, the 3- Finger Gripper can almost pick anything.
应用:
质量检测
机器维修
装配
取放
功能:
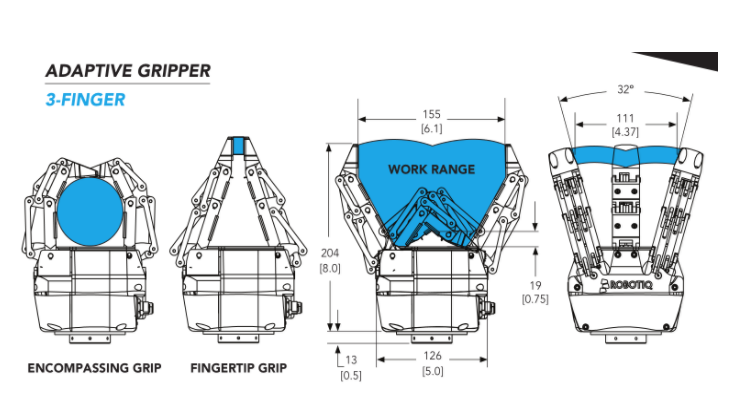
4种抓地类型
捏合模式、宽模式、剪刀模式、基本模式
分别控制手指
从每个手指获取反馈,以获得牢固的抓力及精确度
即插即用
使用我们的三指夹爪能在几分钟内安装并编程您的机器人
项目创新:通过使用我们的夹具和传感器的示例获得灵感:远程操作,人机协作,移动机器人,箱子拾取,配套和高级装配

技术参数:
| 规格 | 参数 |
| 行程(可编程) | 155 mm |
| 夹力(可编程) | 30 70 N |
| 适形抓握载荷 | 10 kg |
| 摩擦抓握载荷 | 2.5 kg |
| 手指位置重复(指尖抓握) | 0.05 mm |
| 闭合速度(可编程) | 22 110 mm/s |
| 夹具质量 | 2.3 kg |
| 主要通信协议 | Modbus RTU (RS-485) |
| 次要通信协议选项 | Modbus TCP,EtherNet/IP,PROFINET,EtherCAT,DeviceNet,CANopen |
Robotiq三指自适应夹具是多功能性和灵活性的最佳选择。 它拾取任何形状的任何物体。它适应物体的形状以获得牢固的抓力,三指夹爪与所有工业机器人兼容。我们为Universal Robots机器人提供方便的现成集成包。 还提供并支持ROS包。 使用Robotiq的三指夹爪,您将专注于您的研究目标,而不是努力整合您的末端执行器。
Versatile Gripper
With force, position and speed control for each finger and 4 different grip modes, the 3- Finger Gripper can almost pick anything.
应用:
质量检测
机器维修
装配
取放
功能:
4种抓地类型
捏合模式、宽模式、剪刀模式、基本模式
分别控制手指
从每个手指获取反馈,以获得牢固的抓力及精确度
即插即用
使用我们的三指夹爪能在几分钟内安装并编程您的机器人
项目创新:通过使用我们的夹具和传感器的示例获得灵感:远程操作,人机协作,移动机器人,箱子拾取,配套和高级装配
技术参数:
| 规格 | 参数 |
| 行程(可编程) | 155 mm |
| 夹力(可编程) | 30 70 N |
| 适形抓握载荷 | 10 kg |
| 摩擦抓握载荷 | 2.5 kg |
| 手指位置重复(指尖抓握) | 0.05 mm |
| 闭合速度(可编程) | 22 110 mm/s |
| 夹具质量 | 2.3 kg |
| 主要通信协议 | Modbus RTU (RS-485) |
| 次要通信协议选项 | Modbus TCP,EtherNet/IP,PROFINET,EtherCAT,DeviceNet,CANopen |






 在线客服
在线客服